Planning the placement of Pixhawk
Immediately, we can see two possible placements for the Pixhawk once we remove the shell of the Rustler. The first image (shown next) would be an optimal place to put the Pixhawk at first glance, but is terrible upon consideration:

It's always a good idea to do a test placement of your components before mounting them. In this case, we can see that where we originally thought we could put our Pixhawk is a terrible location.
The rear of the Pixhawk overlaps the battery compartment. This means when we go to put a battery in the vehicle to drive it, it won't fit. Also, the structural support for the front suspension overlaps with several of our Pixhawk plugs. Finally, our Pixhawk would be leaning forward. If the Pixhawk is not level, it may not function properly (and absolutely would not function properly if this was an air vehicle).
You may wonder, "Why don't we just put it in sideways?" On the top of the Pixhawk, you will notice a white arrowhead on the cube. This indicates the forward direction of the Pixhawk. A deviation in placing this arrow facing forward will result in incorrect compass readings, and an inability to drive the rover properly (it may think it's pointing North, when in fact it's pointing East).
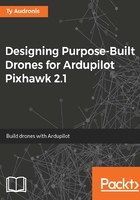
Placement number two is more optimal in some ways, but has its disadvantages too. Let's take a look at the following image:

Placing the Pixhawk on the port side (on the left side of the vehicle in this book; we will be using starboard and port references to eliminate confusion), it can remain level and unobstructed. However, as shown in the preceding image, we'll need to construct a platform for this hollowed-out area of the chassis. Let's look at it from the other side:

There is a definite overhang at the front port corner of the Pixhawk. This means that in the case of a collision or roll, the Pixhawk may sustain severe damage (especially at 70+ mph).
So, we're going to have to construct a platform for the Pixhawk that rests inside the chassis cradle and protects that front corner and the entire port side of the Pixhawk before we start connecting anything.